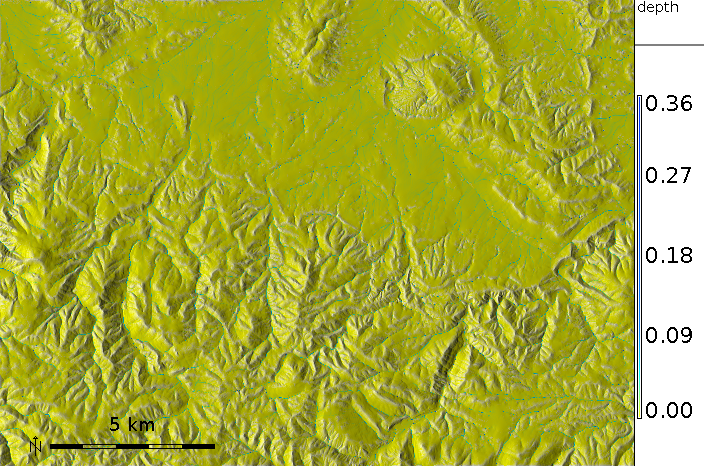
Water depth map in the Spearfish (SD) area
The module automatically converts horizontal distances from feet to metric system using database/projection information. Rainfall excess is defined as rainfall intensity - infiltration rate and should be provided in [mm/hr]. Rainfall intensities are usually available from meteorological stations. Infiltration rate depends on soil properties and land cover. It varies in space and time. For saturated soil and steady-state water flow it can be estimated using saturated hydraulic conductivity rates based on field measurements or using reference values which can be found in literature. Optionally, user can provide an overland flow infiltration rate map infil or a single value infil_val in [mm/hr] that control the rate of infiltration for the already flowing water, effectively reducing the flow depth and discharge. Overland flow can be further controled by permeable check dams or similar type of structures, the user can provide a map of these structures and their permeability ratio in the map traps that defines the probability of particles to pass through the structure (the values will be 0-1).
Output includes a water depth raster map depth in [m], and a water discharge raster map disch in [m3/s]. Error of the numerical solution can be analyzed using the err raster map (the resulting water depth is an average, and err is its RMSE). The output vector points map outwalk can be used to analyze and visualize spatial distribution of walkers at different simulation times (note that the resulting water depth is based on the density of these walkers). Number of the output walkers is controled by the density parameter, which controls how many walkers used in simulation should be written into the output. Duration of simulation is controled by the niter parameter. The default value is 10 minutes, reaching the steady-state may require much longer time, depending on the time step, complexity of terrain, land cover and size of the area. Output water depth and discharge maps can be saved during simulation using the time series flag -t and outiter parameter defining the time step in minutes for writing output files. Files are saved with a suffix representing time since the start of simulation in seconds (e.g. wdepth.500, wdepth.1000).
Overland flow is routed based on partial derivatives of elevation field or other landscape features influencing water flow. Simulation equations include a diffusion term (diffc parameter) which enables water flow to overcome elevation depressions or obstacles when water depth exceeds a threshold water depth value (hmax), given in [m]. When it is reached, diffusion term increases as given by halpha and advection term (direction of flow) is given as "prevailing" direction of flow computed as average of flow directions from the previous hbeta number of grid cells.
Green's function stochastic method of solution.
The Saint Venant equations are solved by a stochastic method called Monte Carlo
(very similar to Monte Carlo methods in computational fluid dynamics or to
quantum Monte Carlo approaches for solving the Schrodinger equation (Schmidt
and Ceperley, 1992, Hammond et al., 1994; Mitas, 1996)). It is assumed
that these equations are a representation of stochastic processes with
diffusion and drift components (Fokker-Planck equations).
The Monte Carlo technique has several unique advantages which are becoming even more important due to new developments in computer technology. Perhaps one of the most significant Monte Carlo properties is robustness which enables us to solve the equations for complex cases, such as discontinuities in the coefficients of differential operators (in our case, abrupt slope or cover changes, etc). Also, rough solutions can be estimated rather quickly, which allows us to carry out preliminary quantitative studies or to rapidly extract qualitative trends by parameter scans. In addition, the stochastic methods are tailored to the new generation of computers as they provide scalability from a single workstation to large parallel machines due to the independence of sampling points. Therefore, the methods are useful both for everyday exploratory work using a desktop computer and for large, cutting-edge applications using high performance computing.
g.region rast=elevation.10m -p
r.slope.aspect elevation=elevation.10m dx=elev_dx dy=elev_dy
# synthetic maps
r.mapcalc "rain = if(elevation.10m, 5.0, null())"
r.mapcalc "manning = if(elevation.10m, 0.05, null())"
r.mapcalc "infilt = if(elevation.10m, 0.0, null())"
# simulate
r.sim.water elevin=elevation.10m dxin=elev_dx dyin=elev_dy \
rain=rain manin=manning infil=infilt \
nwalk=5000000 depth=depth
# visualize
r.shaded.relief elevation.10m
d.mon x0
d.font Vera
d.rast.leg depth pos=85
d.his i=elevation.10m.shade h=depth
d.barscale at=4,92 bcolor=none tcolor=black -t
ERROR: nwalk (7000001) > maxw (7000000)!
Jaroslav Hofierka
GeoModel, s.r.o. Bratislava, Slovakia
hofierka@geomodel.sk
Chris Thaxton
North Carolina State University
csthaxto@unity.ncsu.edu
Last changed: $Date$