DESCRIPTION
v.hull computes the convex hull of a vector map and outputs
the convex hull polygon as a vector area map. The convex hull, or
convex envelope, for an object or a set of objects is the minimal
convex set containing the given objects. This module creates a vector
polygon containing all vector points or lines of the input map.
In the case of 3D input points, the hull will be a 3D hull as well,
unless the user specifies the -f flag. The 3D hull will be
composed of triangular faces.
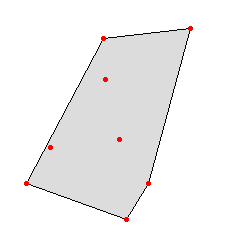
Fig: Convex hull polygon created with v.hull
NOTES
In order to use the where option the layer option must
be set to a positive number (the default is '-1' for 'all layers'), otherwise
all points from all layers will be used and the cats and where
options will be ignored.
EXAMPLE
Example of v.hull 3D output (using two random 3D point
clouds, North Carolina sample data set):
g.region rural_1m -p
r.mapcalc "zero = 0"
v.random -z output=random3d_a n=10 zmin=0 zmax=200
v.random -z output=random3d_b n=15 zmin=400 zmax=600
v.hull input=random3d_a output=random3d_a_hull
v.hull input=random3d_b output=random3d_b_hull
d.mon wx0
d.vect random3d_a_hull
d.vect random3d_a color=red
d.vect random3d_b_hull
d.vect random3d_b color=red
# 3D view in wxGUI (g.gui)
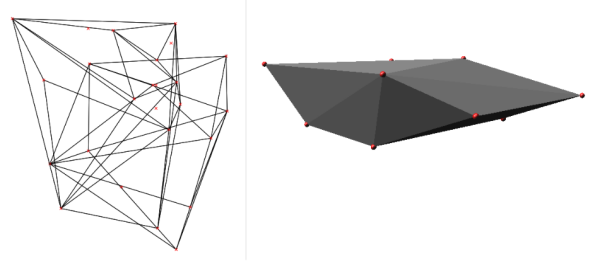
Fig: Convex hull in 3D from 3D points created with v.hull
REFERENCES
- M. de Berg, M. van Kreveld, M. Overmars, O. Schwarzkopf,
(2000). Computational geometry, chapter 1.1, 2-8.
- J. O'Rourke, (1998). Computational Geometry in C (Second
Edition), chapter 4.
SEE ALSO
v.delaunay
AUTHOR
Andrea Aime, Modena, Italy
Markus Neteler, ITC-irst (update to 5.7)
Benjamin Ducke, CAU Kiel (3D hull support)
Martin Landa, CTU in Prague, Czech Republic (vector lines support)
Last changed: $Date$